Openings for new PhD students
Openings for NSF-NRI: Scalable and Customizable Intent Inference and Motion Planning for Socially-Adept Autonomous Vehicles
What is the project about?
This project will promote the progress of science, and advance the national prosperity and safety, by tackling an important and challenging problem for autonomous vehicles (AVs): interaction of AVs with human-driven vehicles. Currently, there is a lack of theory that allows an autonomous vehicle to interact with multiple surrounding vehicles in a safe and socially-adept manner. This National Robotics Initiative (NRI) project will address this critical need by developing a novel algorithm framework for an autonomous vehicle to be able to anticipate other vehicles’ behavior and customize its motion according to the local driving culture. This project serves the national interests by advancing knowledge in the fields of control engineering, machine learning, and cognitive science. The project will also make an important step in making widely adopted autonomous vehicles a reality, which promises to increase transportation system efficiency and safety. Project results will be disseminated through a project website, open-source simulation software, and public datasets. The impacts of this project will be broadened through various educational activities, including a new class on collaborative autonomous driving, undergraduate research projects, and outreach to the local community through lab tours.
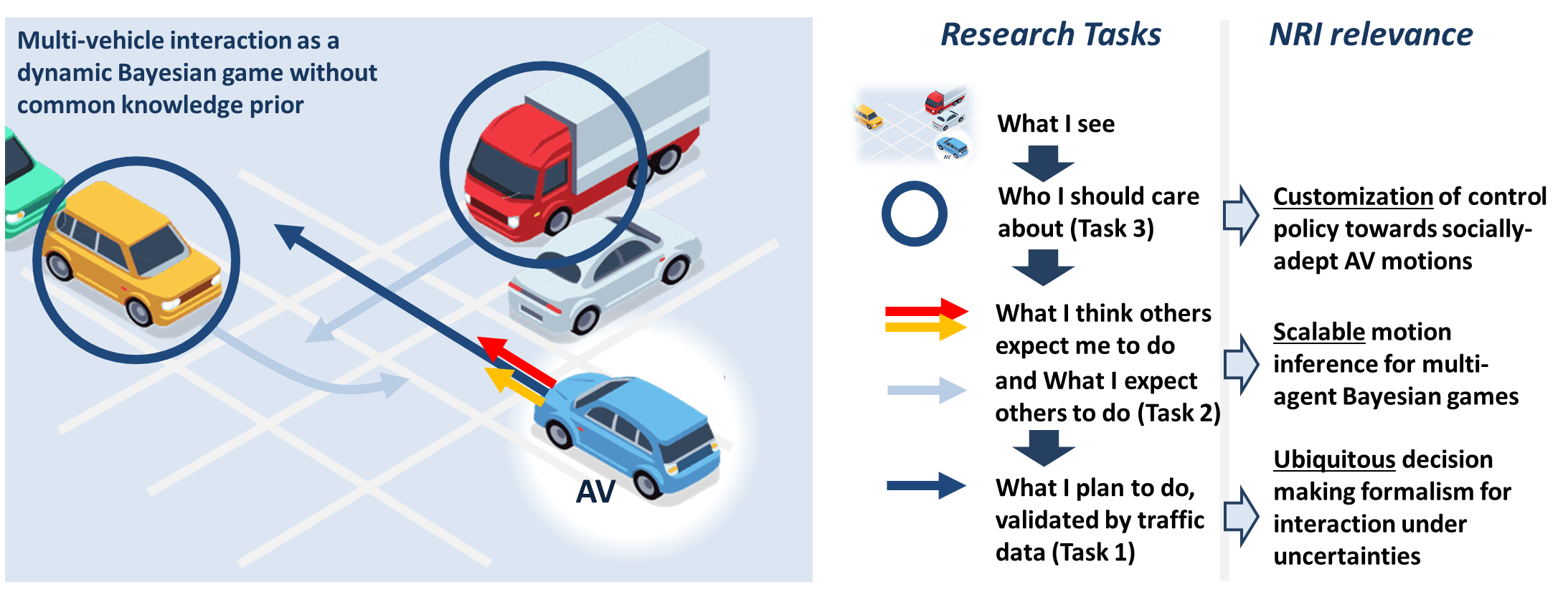
This project aims at answering two fundamental research questions: 1) what formalisms of intent inference and motion planning are capable of creating socially-adept motions, and 2) what embodiment of these formalisms can achieve scalability for multi-vehicle interactions and customizability for changing driving cultures? To answer these questions, the research team will pursue the following three objectives. First, the project team will build a Bayesian game model to represent vehicle interactions, and develop mechanistic intent inference and motion planning policies. Second, a message passing neural network will be developed to enable scalable intent inference and motion prediction of multiple surrounding vehicles. Third, a social attention mechanism will be developed that allows an autonomous vehicle to actively prioritize its various control considerations, e.g., safety and courtesy towards the surrounding vehicles. The developed algorithms will be validated with real-world driving scenarios such as intersections and highways in a driving simulator designed through collaboration with autonomous vehicle manufacturers and research institutes.
Who are we looking for?
-
The student is expected to have a strong background in control and optimization, with decent familiarity with statistics and machine learning.
-
The student has a strong motivation to pursue a PhD degree in one of the following domains: Computer Science, Mechanical Engineering, and Aerospace Engineering.
How to apply?
For interested students, please send your resume and transcript to yiren at asu dot edu with a title starting with “[PhD application]”. Please explain briefly why you are interested in this project. Thank you!