Scalable and Customizable Intent Inference and Motion Planning for Socially-Adept Autonomous Vehicles
Collaborators: Yiwei Wang, Varun Jammula, Dr. Wenlong Zhang, Dr. Yezhou YangAbstract
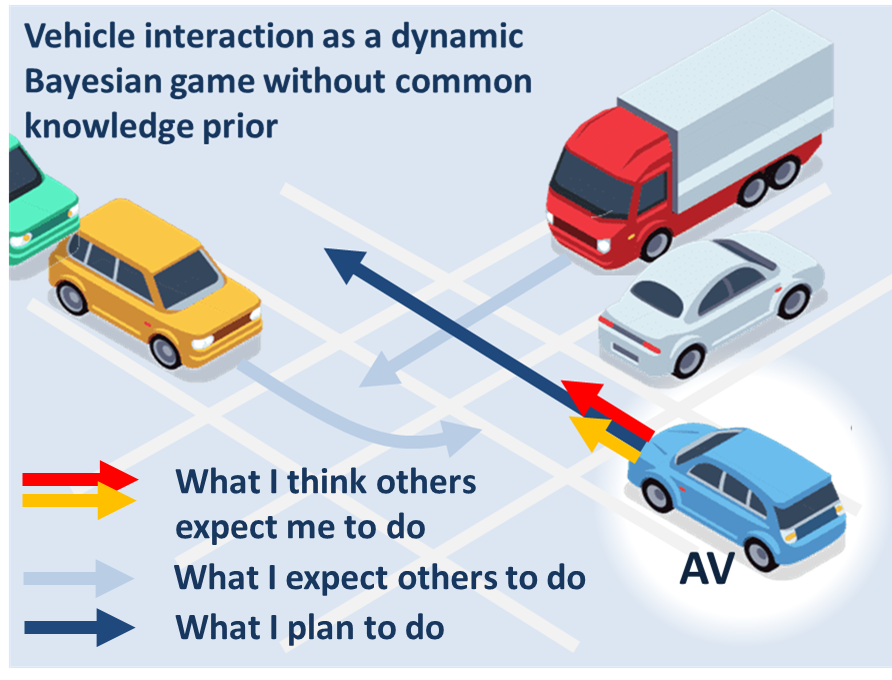
This project will promote the progress of science, and advance the national prosperity and safety, by tackling an important and challenging problem for autonomous vehicles (AVs): interaction of AVs with human-driven vehicles. Currently, there is a lack of theory that allows an autonomous vehicle to interact with multiple surrounding vehicles in a safe and socially-adept manner. This National Robotics Initiative (NRI) project will address this critical need by developing a novel algorithm framework for an autonomous vehicle to be able to anticipate other vehicles’ behavior and customize its motion according to the local driving culture. This project serves the national interests by advancing knowledge in the fields of control engineering, machine learning, and cognitive science. The project will also make an important step in making widely adopted autonomous vehicles a reality, which promises to increase transportation system efficiency and safety.
Images
Related Papers
1. Wang, Yiwei and Ren, Yi and Elliott, Steven and Zhang, Wenlong. (2019). Enabling Courteous Vehicle Interactions through Game-based and Dynamics-aware Intent Inference. IEEE Transactions on Intelligent Vehicles. , Source Code